相机的外参和内参
TLDR
关键概念
相机是用于捕捉图像的传感器,它们将世界中的点投影到我们看到的2D平面上。
这种变换通常分为两个部分:外部参数和内部参数。相机的外部参数取决于其位置和方向。相机的内部参数则取决于它如何捕捉图像(焦距、光圈、视场、分辨率)。
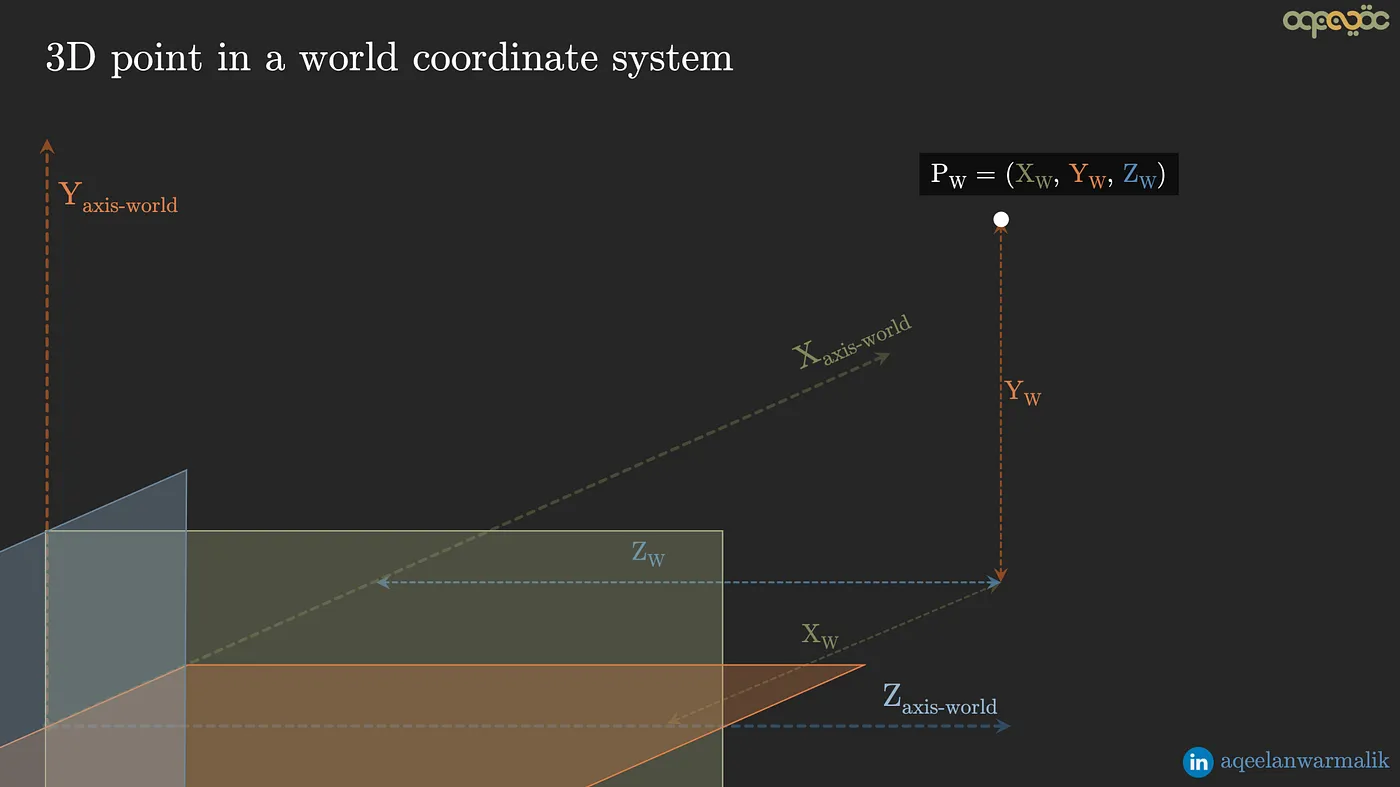
坐标系
在成像过程中,主要使用三种坐标系:
- 世界坐标系(3D):这是一个固定的全局坐标系,用于描述场景中物体的绝对位置。
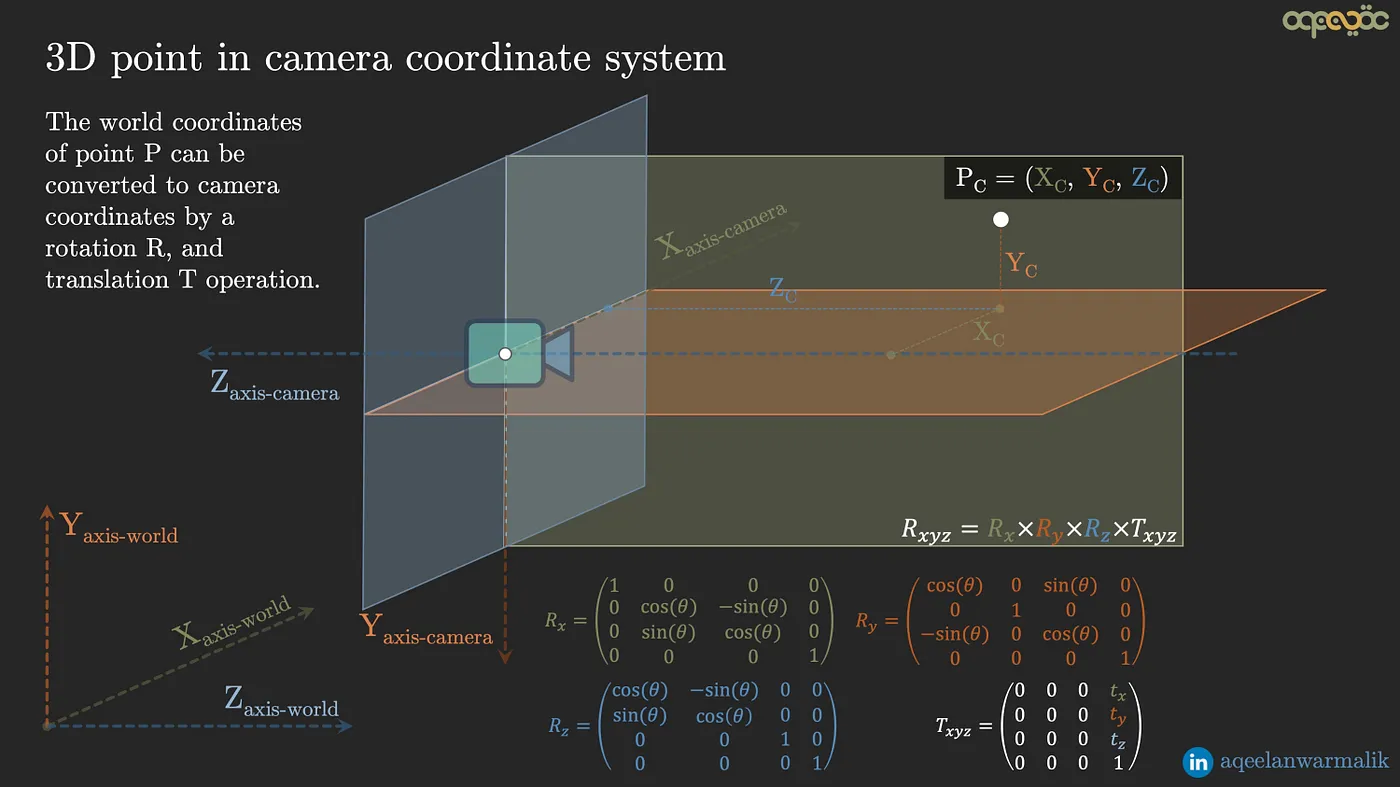
- 相机坐标系(3D):这是以相机为中心的坐标系,用于描述相对于相机的物体位置。
- 图像坐标系(2D):这是投影到2D图像平面上的坐标系,用于描述图像上像素的位置。
- 像素坐标系(2D):这是具体到图像像素的坐标系,通常以图像左上角为原点。
外部参数
外部参数包括旋转矩阵 $R$ 和平移向量 $t$ ,它们描述了世界坐标系到相机坐标系的变换。具体来说,给定一个世界坐标系中的点 $P_w$ ,通过外部参数变换可以得到相机坐标系中的点 $P_c$ :
$P_c = R \cdot P_w + t$
其中 $R$ $$ 是一个 $3 \times 3$ 的旋转矩阵, $t$ 是一个 $3 \times 1$ 的平移向量。
内部参数
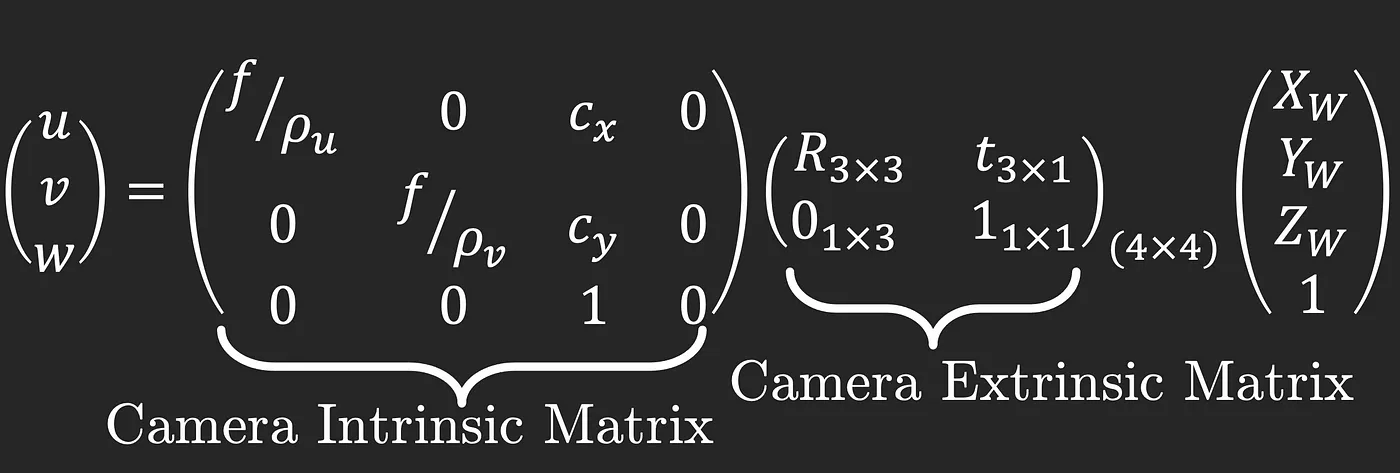
内部参数描述了相机的成像特性,主要包括焦距 $f$ 、主点 $(c_x, c_y)$ 、像素尺寸等。内部参数矩阵 $K$ 可以表示为:
$K = \begin{pmatrix} f_x & 0 & c_x \ 0 & f_y & c_y \ 0 & 0 & 1 \end{pmatrix}$
其中 $f_x$ 和 $f_y$ 是水平方向和垂直方向的焦距, $c_x$ 和 $c_y$ 是主点(即光轴与图像平面的交点)的坐标。
图像形成
通过将外部和内部参数结合起来,可以将世界坐标系中的点转换到图像坐标系中。首先,使用外部参数将世界坐标系中的点转换到相机坐标系:
$P_c = R \cdot P_w + t$
然后,使用内部参数将相机坐标系中的点投影到图像平面:
$\begin{pmatrix} u \ v \ 1 \end{pmatrix} = K \cdot P_c$
其中 $(u, v)$ 是图像平面上的像素坐标。
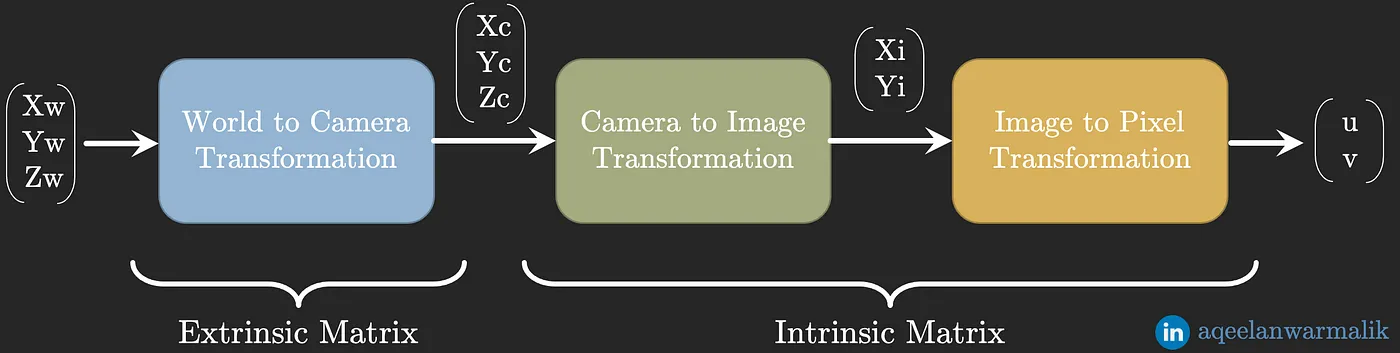
成像步骤
世界坐标系(3D)
相机坐标系(3D)
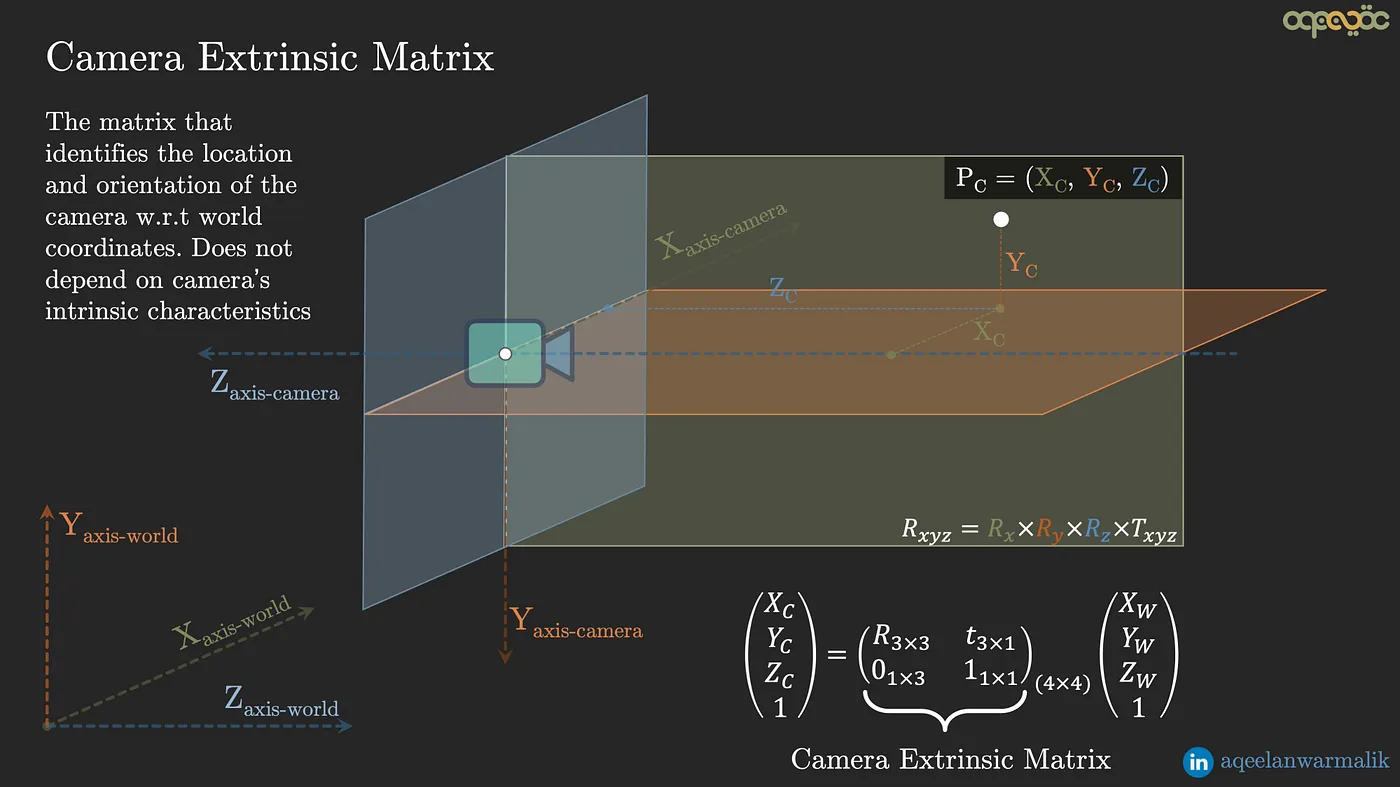
$\begin{pmatrix}X_C\Y_C\Z_C\1\end{pmatrix}=\underbrace{\begin{pmatrix}R_{3\times3}&t_{3\times1}\0_{1\times3}&1_{1\times1}\end{pmatrix}}_{(4\times4)}\begin{pmatrix}X_W\Y_W\Z_W\1\end{pmatrix}\\text{Camera Extrinsic Matrix}$
图像坐标系(2D):针孔模型
针孔模型:光线通过相机开口的中心,并在另一端投影到二维平面上。相机捕捉到的图像就是这个二维平面。
这是一种有损变换,这意味着将点从相机坐标系投影到二维平面上是不可逆的(深度信息丢失)。
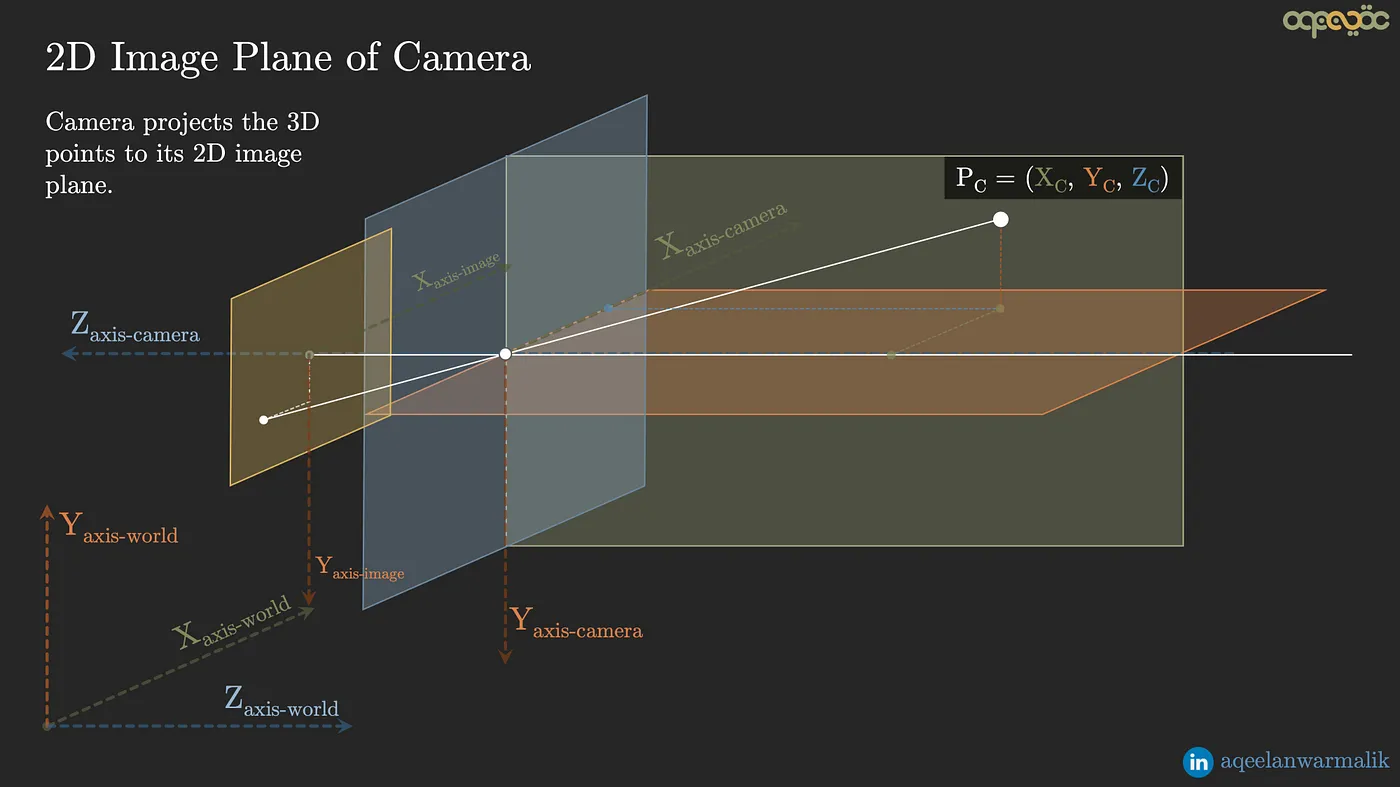
确定坐标:点的X和Y坐标被投影到二维平面上。二维平面距离相机为 f(焦距)。投影 $( X_i, Y_i )$ 可以通过相似三角形法则找到(进入和离开相机中心的光线与x轴和y轴的角度相同,分别为 $\alpha$ 和 $\beta$ )。
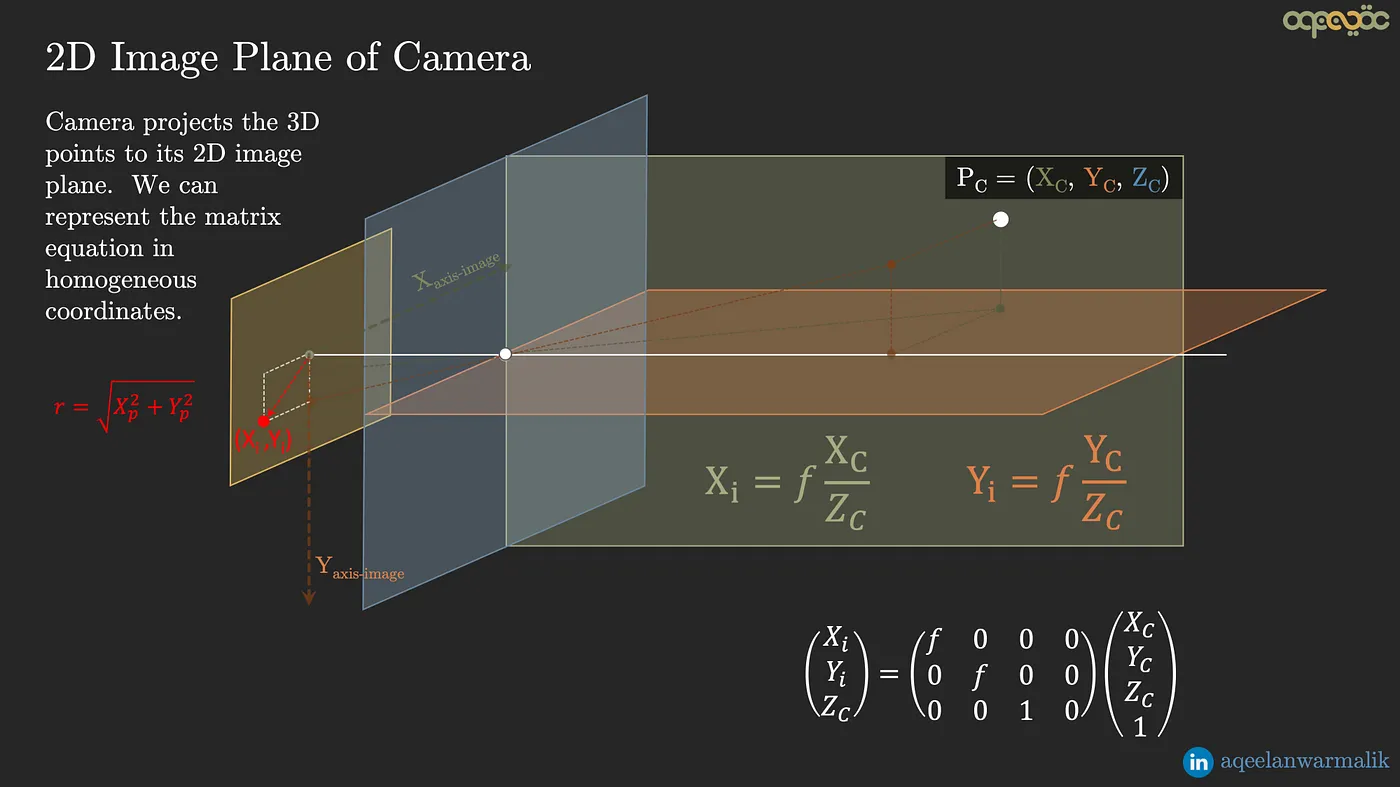
$\begin{pmatrix}X_i\Y_i\Z_C\end{pmatrix}=\begin{pmatrix}f&0&0&0\0&f&0&0\0&0&1&0\end{pmatrix}\begin{pmatrix}X_C\Y_C\Z_C\1\end{pmatrix}$
像素坐标系(2D)
常规情况
- 像素坐标系 $[u, v]$ 表示通过将图像坐标系中的点离散化而得到的整数值。
- 像素坐标系的原点在左上角,因此除了离散化之外,还需要一个平移操作 $(c_x, c_y)$。
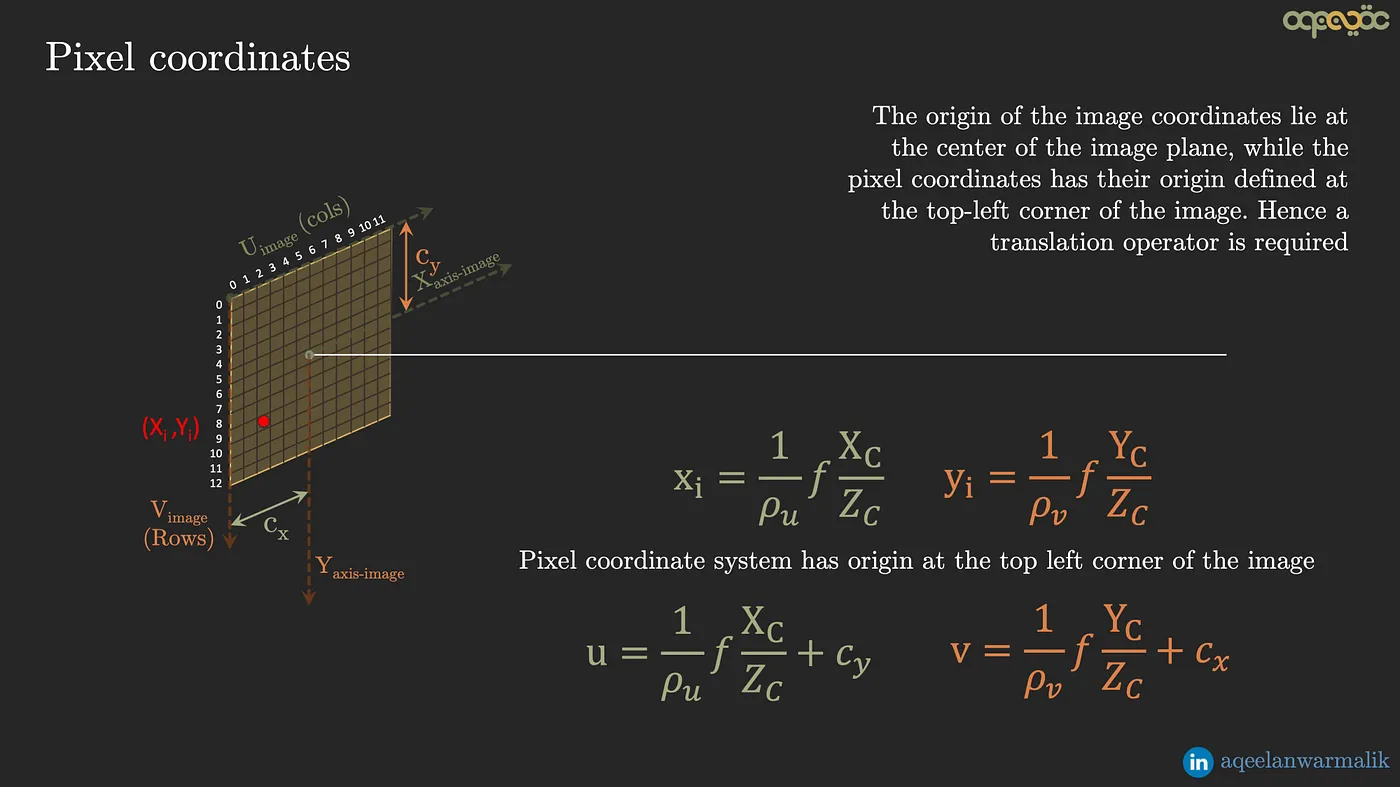
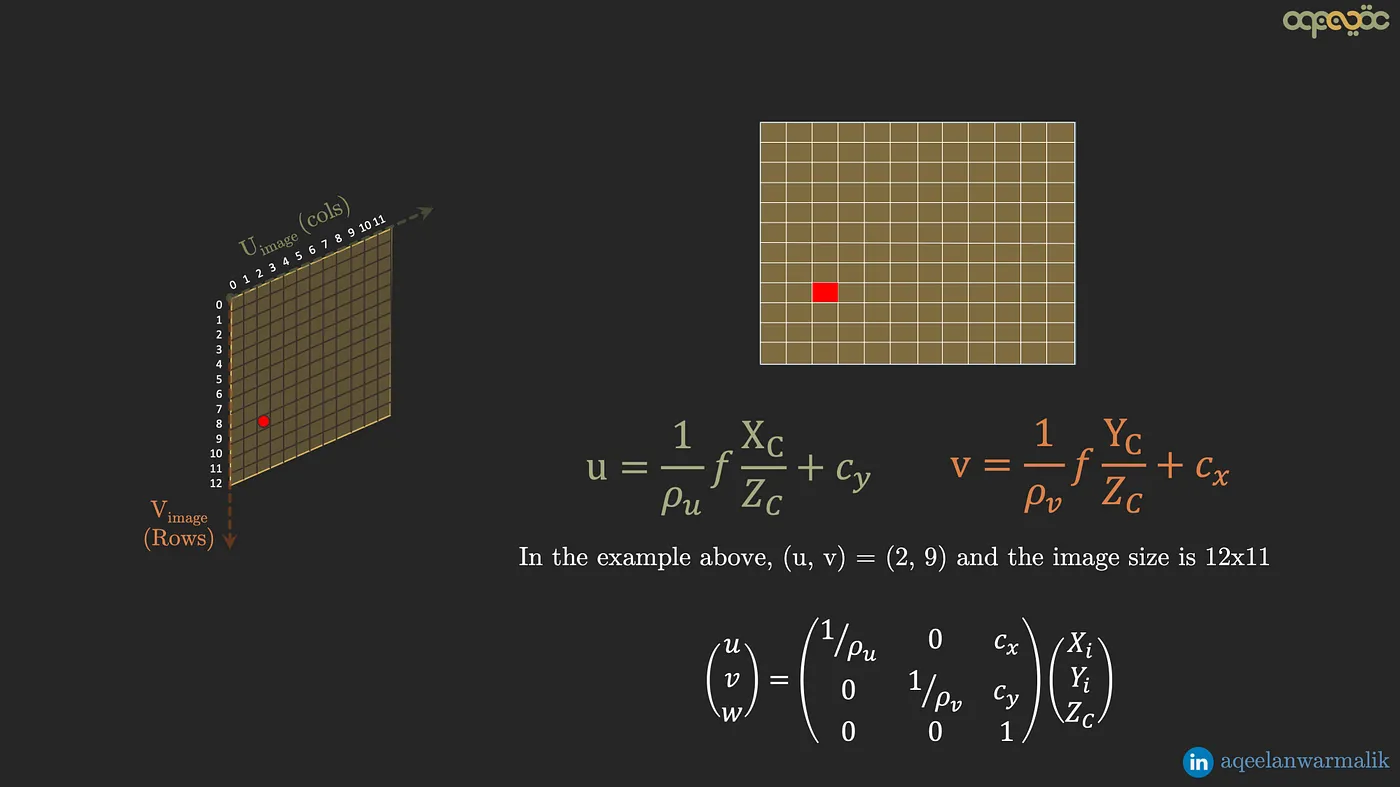
$\begin{pmatrix}u\v\w\end{pmatrix}=\begin{pmatrix}1/\rho_u&0&c_x\0&1/\rho_v&c_y\0&0&1\end{pmatrix}\begin{pmatrix}X_i\Y_i\Z_C\end{pmatrix}$
特殊情况
有时,二维图像平面不是矩形,而是倾斜的,即X轴和Y轴之间的角度不是90度。在这种情况下,在进行从图像到像素坐标系的变换之前,需要进行另一个变换将点从理想的矩形平面转换到倾斜平面。
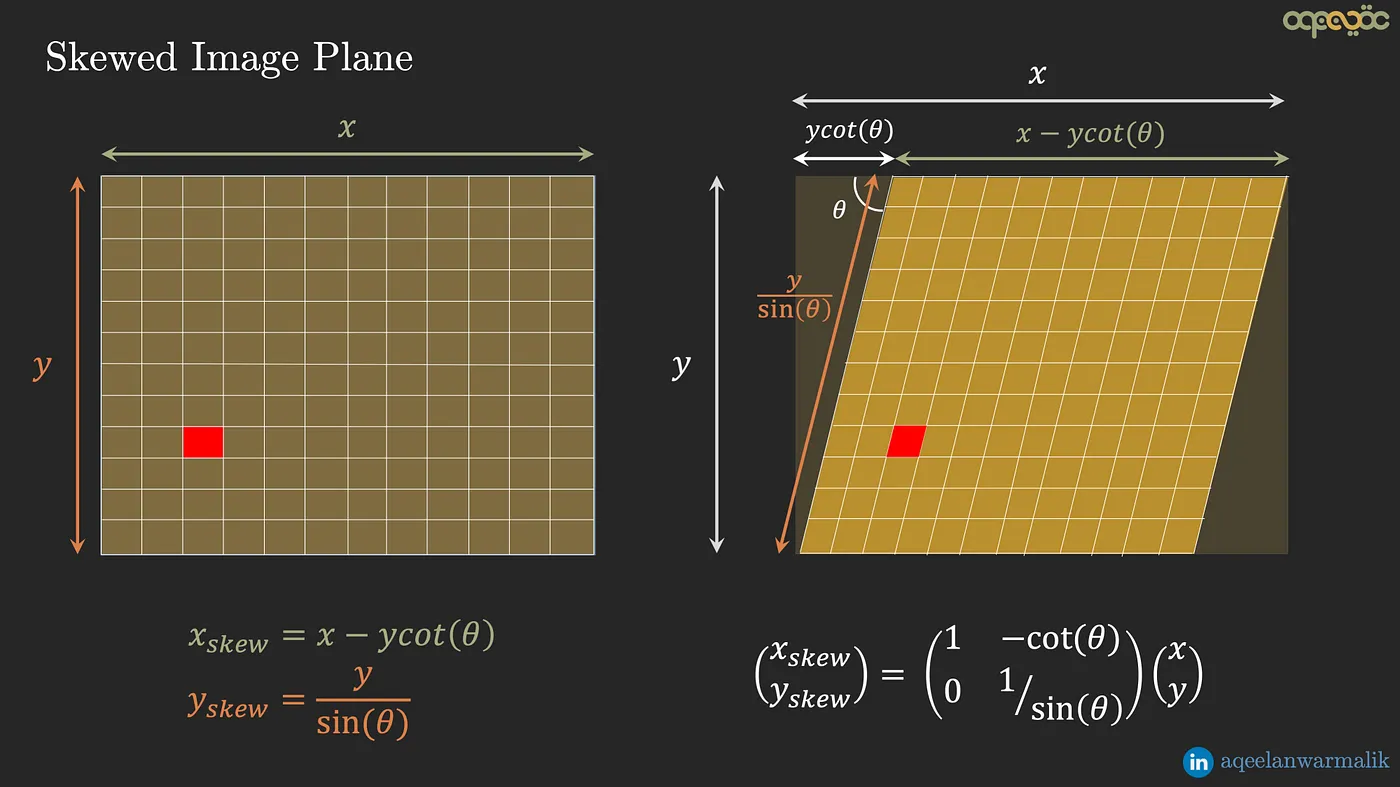
$\binom{x_{skew}}{y_{skew}}=\begin{pmatrix}1&-\cot(\theta)\0&1/_{\sin(\theta)}\end{pmatrix}\binom{x}{y}$
总结
变换
- 世界到相机(World-to-Camera):3D到3D的投影。包括旋转、缩放和平移操作。
- 相机到图像(Camera-to-Image):3D到2D的投影。有信息丢失,取决于相机模型及其参数(如针孔模型、f-theta等)。
- 图像到像素(Image-to-Pixel):2D到2D的投影。从连续到离散。包括量化和原点移动。
参数
相机外参矩阵 (World-to-Camera)
将点从世界坐标系转换到相机坐标系。取决于相机的位置和方向。
相机内参矩阵 (Camera-to-Image, Image-to-Pixel)
将点从相机坐标系转换到像素坐标系。取决于相机的属性(如焦距、像素尺寸、分辨率等)。